动作识别
云原生
架构
jstl
kprobe
PMP
前缀和
PDF合并与拆分
微机原理
绝对路径和相对路径
skill 命令
魔百盒刷机
指针空值nullptr
无线控制器
网赚项目
脚本实战
软考
web3py
读写分离
memory
rviz2
2024/4/12 1:02:51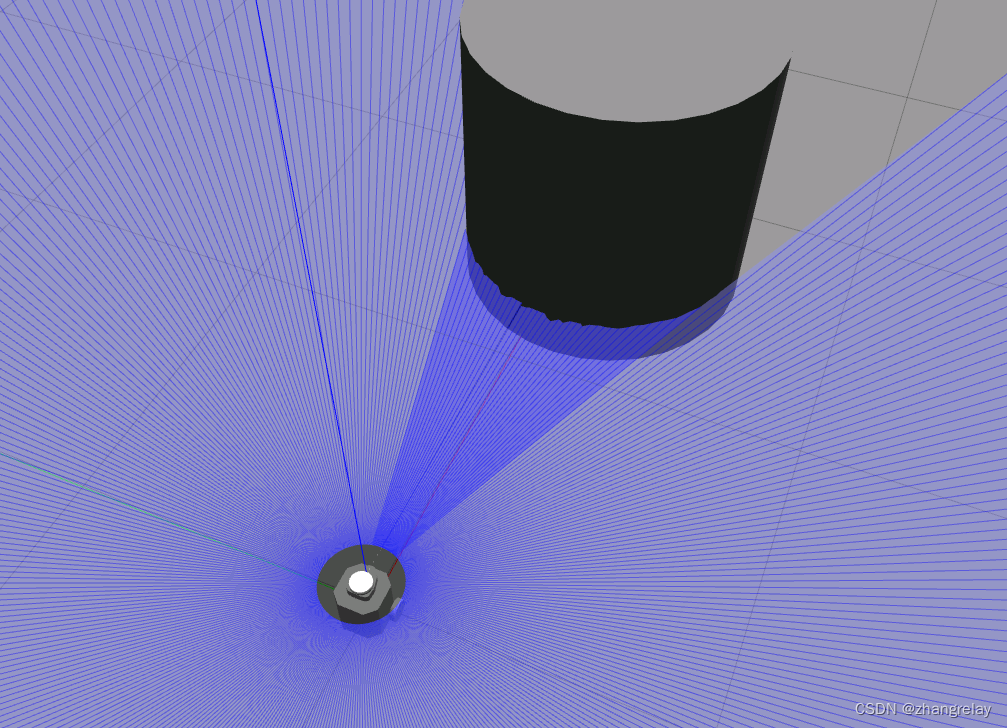
ROS2机器人编程简述humble-第四章-AN OBSTACLE DETECTOR THAT USES TF2 .1
如何检测一个障碍物呢?视觉、雷达?可视化效果如何?机器人所装备的传感器例如感知设备,主要负责环境的获取和识别。然后,结果发送给电机控制运动,在环境中自主、智能决策和规划。需要先简单看一下仿真可视化…

【ROS】RViz2源码下载、编译、运行
1、源码下载
1.1 源码地址
ROS1对应的RViz源码:https://github.com/ros-visualization/rviz ROS2对应的RViz2源码:https://github.com/ros2/rviz
注意:在搜索RViz2源码时,使用傻度搜索的结果是对应ROS1的RViz,使用谷歌的搜索结果是正确的,RViz和RViz2的源码链接上面已…
Jetson Xavier NX编译Rviz2
目录
容器
编译
foxy
RViz2 容器
修改docker镜像保存路径
$ systemctl show --propertyFragmentPath docker
$ sudo mkdir /ssd/docker
$ sudo vi /lib/systemd/system/docker.service--graph/ssd/docker
$ sudo systemctl daemon-reload
$ sudo service docker restar…
【ROS】RViz2源码分析(三):核心类VisualizerApp
【ROS】郭老二博文之:ROS目录
1、简述
VisualizerApp包含了三个主要的功能: QApplication:程序中主要调用app_->processEvents()来处理刷新界面,处理闪屏VisualizationFrame:窗口类都在此;RosClientAbstractionIface包含rclcpp::Node:代表ROS节点2、VisualizationF…
ros2内结合gazebo和rviz进行yolov8检测记录
前提:第一次接触ros2, 遇到的问题解决方式不一定准确,只是这次我尝试成功了,想和大家分享一下。
ubuntu20.04系统
目录
1. ros2
1.1 ros2是啥?
1.2 ros2的版本和ubuntu版本的对应关系,当下入门尤其是ubuntu20.04系…
【ROS】RViz2源码分析(一):介绍
【ROS】郭老二博文之:ROS目录
1、简述
1)源码下载 源码下载参见本人博客:【ROS】RViz2源码下载、编译、运行
2)根目录列表
~/git/rviz2/src/rviz$ tree -L 1
.
├── docs
├── LICENSE
├── README.md
├── rviz2
├── rviz_assimp_vendor
├── rviz_commo…
【ROS】RViz2源码分析(二):main函数及编译配置详解
【ROS】郭老二博文之:ROS目录
1、main函数
#include <memory>
#include <string>
#include <vector>#include <QApplication>